

Pak Vast!
Ontwerpproces
Concepten
Iedereen uit onze groep heeft een eigen ontwerp bedacht voor het grijpmechanisme, de horizontale en de verticale beweging. Elk groepslid heeft die ontwerpen beoordeeld met een cijfer. Daarbij zijn het grijpmechanisme, de horizontale en de verticale beweging apart beoordeeld.
De beoordeling hebben wij op de volgende manier gedaan, met deze resultaten:

Schetsen grijper
Grijper 3D

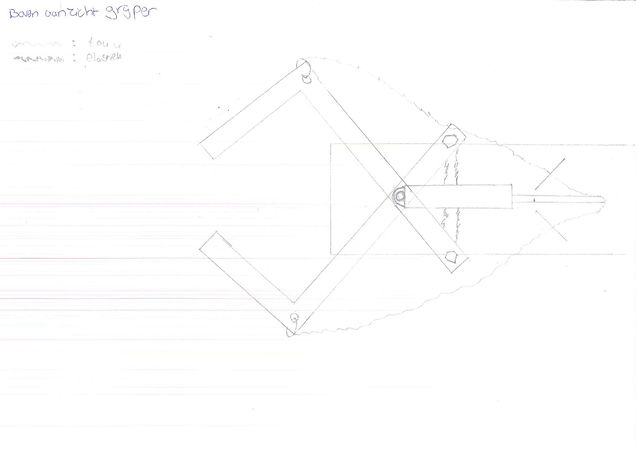
Bovenaanzicht
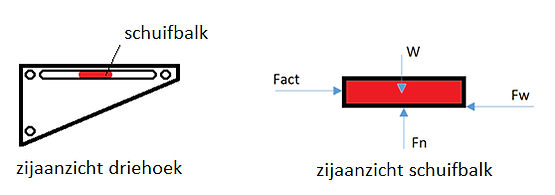
Zijaanzicht

3D Driehoek

Motivatie Ontwerp
Bij het ontwerpen van onze grijper zijn wij van de volgende eisen uit gegaan:
Lijst van eisen (van de klant):
-
Tetrapakken optillen (0,5 liter), gewicht met inhoud <0,5 kg
-
Ronde flesjes optillen (0,5 liter), gewicht met inhoud <0,5 kg
-
Bekertje optillen min. 50 mm karton/plastic met water en lepeltje/rietje boven de rand (<0,5 kg)
-
Inhoud moet in het bekertje blijven zitten
-
Moet objecten op een 15 cm hoger en minimaal (enkele cm’s) naast liggend plateau kunnen zetten
-
Moet aangedreven worden door pneumatische actuatoren
-
Grijper bevestigd aan de helft van het basisframe
-
Acties grijper: beginnen op de laagste stand, naar het object toe bewegen, object verplaatsen met X+100mm en Y+150mm, neerzetten en terug, let op botsen tijdens de beweging.
-
Actuatoren moeten snel in- en uitgebouwd kunnen worden (binnen 5 min.)
Lijst van onze eisen:
-
Tetrapakken en flesjes mogen niet (om)vallen
-
Tetrapakken en flesjes mogen niet kapot, indrukken en terugveren mag wel
-
Grijper mag niet bezwijken
Daarnaast hebben wij enkele wensen opgesteld waaraan wij wilden voldoen:
Lijst van wensen:
-
Gebruik van beschikbare 3 actuatoren
-
Zo goedkoop mogelijk
-
Zo energiezuinig mogelijk
-
Stabiele constructie
-
Soepele bewegingen (niet te abrupt)
-
Zo simpel mogelijk
Hierbij moet ook rekening worden gehouden met de volgende acties die de grijper chronologisch uit moet kunnen voeren:
-
Grijper begint in laagste stand
-
Beweegt naar voorwerp toe
-
Pakt voorwerp
-
Verplaatst voorwerp omhoog en opzij
-
Plaatst voorwerp op plateau
-
Laat voorwerp los
-
Beweegt naar beginstand terug
Naar onze mening zou de grijper geslaagd zijn als hij aan de bovenstaande eisen en wensen zou voldoen.
Ons definitieve ontwerp is ontstaan door de verschillende bewegingen apart te benaderen. Wij hebben met name de grijpers van vorig jaar gebruikt ter inspiratie en om problemen te voorzien, en zo aan alle voorwaarden te voldoen.
Aan de hand van de 3 beschikbare actuatoren, hebben wij 3 verschillende onderdelen en daarmee 3 bewegingen los van elkaar ontworpen. Eén actuator voor de beweging naar de beker toe, één actuator voor de beweging omhoog, en één actuator voor het pakken van het voorwerp.
Hierin zit de beweging opzij dus niet verwerkt. Dit wilden wij doen door de grijper weer terug te laten bewegen langs dezelfde lijn als hoe hij ook naar het voorwerp was toe bewogen. Hiermee zouden wij alsnog een horizontale verplaatsing van de grijper en zo ook het voorwerp behalen. Bovendien hielden we een simpele constructie door geen systeem nodig te hebben die zowel een horizontale als verticale beweging uitvoerde met slechts 1 actuator.
Voor het optillen van het voorwerp hebben wij 2 parallellogrammen ontworpen met armen van ongeveer 300 mm. Door het gebruik van armen konden we de beweging van de actuator van 100 mm, omzetten in een beweging van 150 mm of meer. Door gebruik te maken van een parallellogram zouden de uiteindes verticaal boven elkaar blijven ondanks de verschillende standen. Bovendien is een parallellogram simpel te maken en te bevestigen. Deze armen hebben we uit onze perspexplaat laten snijden, uiteraard met kleine gaten voor de bevestiging aan het bord en de actuator, en gaten zodat de rest van de grijper bevestigd kon worden. Wij hebben perspex gekozen omdat dit voor ons beschikbaar was gesteld en dus goedkoop was. Ook was het stevig genoeg en via de lasersnijder makkelijk te bewerken.
Voor de horizontale beweging naar het voorwerp toe, hebben we met name rekening gehouden met het feit dat de rest van onze grijper aan de uiteinden van de twee parallellogrammen bevestigd moesten worden. Als eindontwerp hebben we twee langwerpige driehoeken gebruikt, die makkelijk aan beide parallellogrammen vastgemaakt konden worden. In deze driehoeken zit een sleuf, waar een plaatje doorheen geschoven kan worden. Dit plaatje wordt door een actuator die vastzit aan het parallellogram heen en weer geschoven. Doordat de lasersnijder geen probleem heeft met het maken van een sleuf was de fabricage van de driehoeken ook geen probleem. Zo hebben we op een eenvoudige manier de horizontale beweging bewerkstelligd, die ook goed aansluit bij de parallellogrammen.
De 3e en laatste actuator hebben wij gebruikt om het voorwerp vast te pakken en los te laten. Hierbij was de grootste uitdaging dat de grijper de beker niet kapot mocht grijpen, of te abrupt pakken waardoor de inhoud eruit zou komen. Toch moest hij wel stevig genoeg zijn om een halve liter op te kunnen tillen. Als oplossing hebben wij bedacht dat het sluiten van de grijper door een (beter te controleren) elastiek wordt gedaan, en de actuator slechts dient voor het openen van de grijper. Dit hebben wij gedaan door aan de achterkant van de schaar (waar de beker dus niet zit) elastieken te plaatsen die de grijper dicht trekken. Aan de zijkanten van de schaar zitten gaten waar touwen zijn bevestigd. Wanneer de actuator aan de touwen trekt, zal de grijper openen. Wanneer de actuator aan de touwen duwt, zullen te touwen slap komen te hangen en zal alleen het elastiek nog werken op de grijper. We hebben gekozen voor twee lagen perspex van de schaar boven elkaar (ze kunnen dus in elkaar schuiven), waardoor we de druk beter konden verdelen en we meer grip hadden op het voorwerp. Hierdoor zal de beker dus niet fijngeknepen worden, en ook zal hij voldoende grip hebben om het halve literpak op te tillen.
Nu was de grootste uitdaging nog om de ‘hand’ aan de rest van de grijper vast te krijgen inclusief actuatoren. Dit hebben we gedaan door een lange houten plaat te bevestigen op het perspex-plaatje dat tussen de driehoeken schuift. Aan het einde hebben we een scharnierpunt (lange bout) gemaakt waar de schaar aan werd bevestigd. Oorspronkelijk was het idee om ook de actuator die de grijper opent, vast te maken op de houten plaat. Achteraf bleek alleen dat het houten plankje lang genoeg kon worden omdat er een bout in de weg zat achter de driehoeken. Dit hebben we opgelost door de actuator ook te bevestigen aan het scharnierpunt. Nu stond de actuator de andere kant op gericht, maar dit maakte voor de praktijk niet uit: duwen of trekken leverde allebei hetzelfde resultaat.
Wat er allemaal beter kon ontwerptechnisch gezien, leest u in de discussie.
Resultaat
Krachtenanalyse
Los van een werkende grijper is het natuurlijk belangrijk te weten waarom hij wel of niet werkt. Hieronder ziet u een versimpelde versie van onze krachtenanalyse die natuurkundig bewijst dat de gebruikte pneumatische actuatoren zonder moeite de grijper in beweging kunnen brengen.
Hieronder staan de massa’s van de op te tillen onderdelen van onze grijper. Deze zijn voornamelijk van belang om de benodigde kracht te berekenen in de grote actuator die als hefboom functioneert.

Dichtheid onderdelen
Perspex dichtheid (ρ): 1,18g/cm3
Hout dichtheid (ρ): 0,78g/cm3
Massa’s
-
Kleine actuator: 97g (x2)
-
Grote actuator: 151g (niet op te tillen)
-
Op te tillen object: 500g
-
Bouten en moeren: ~100g
Maximale leverbare kracht
-
Kleine actuator: 34,34N
-
Grote actuator: >34,34N
Totale massa: 1,580kg

Het momentenevenwicht rond D:
De krachten in scharnierpunten A en B leveren een moment in dezelfde richting om D als de actuator. Hierdoor wordt de actuator minder belast, maar om de formule te vereenvoudigen zijn deze krachten weggelaten. Dus de maximale benodigde kracht van de actuator ligt feitelijk nog lager. We gaan ervan uit dat aangrijpingspunt van zwaartekracht van de grijper op ⅓ van de driehoek ligt vanaf links gezien.
Te leveren kracht actuator bij C: Fact = 12,85N
Conclusie: Aangezien de kracht die de actuator kan leveren meer dan 34,34N is, zal de grijper gemakkelijk omhoog bewegen.

Los van de grote actuator die het hele systeem omhoog brengt is er ook een horizontale uitschuifbeweging. Hieronder de resulterende wrijving die wordt geleverd bij een kracht van 34,34N van de kleine actuator.
Fact = μ * W
Om met het gewicht van onze grijper een wrijvingskracht te genereren die gelijk is aan de kracht van de actuator, moet de wrijvingscoëfficiënt gelijk zijn aan: μ = 14,1 (aan de hand van bovenstaande formule).
Conclusie: Dit is geen realistische waarde voor μ. De echte waarde zal hier ver onder liggen en dus krijgt de actuator het plateau makkelijk in beweging.
Evaluatie
Conclusie
In de afgelopen weken moesten wij een grijper bouwen die een pak op kon tillen en 15 cm hoger op een plateau kon plaatsen. Tijdens het bedenken en fabriceren van onze grijper zijn er bepaalde complicaties opgetreden. Aangezien wij niet veel tijd hadden om de grijper te maken, zijn er vooral in de details dingen mis gegaan. Vanwege het tijdgebrek in de fabricage, moesten wij zorgen dat we het hele ontwerp inclusief elk boutje, moertje en alle bevestigingspunten hadden uitgedacht. Dit is ons alleen niet helemaal gelukt. Zo hadden wij niet erg goed nagedacht over de plaatsing van de pneumatische actuatoren op ons systeem. Vooral de kleine actuator die het plateau waar de grijper op stond zou uitschuiven was lastig te bevestigen. Uiteindelijk hebben wij hier wel een oplossing voor bedacht, namelijk het bevestigen van de actuator aan de dwarsverbinding tussen de twee bovenste stangen van het parallellogram. Het enige nadeel was dat de actuator hierdoor schuin kwam te staan. Doordat het niet gelukt is de grijper in 1 middag te bouwen, moesten we tijdens de testtijd nog veel aan de grijper bouwen, en hebben we geen goede testjes kunnen doen. Dit hebben we gelukkig op kunnen lossen door nog een latere keer onze grijper te testen en te filmen. Al met al is onze grijper voor een groot deel geslaagd: het heeft een pak vast kunnen pakken, 150 mm op kunnen tillen en enkele tientallen mm horizontaal verplaatst. Het is niet gelukt om eerst naar het voorwerp toe te bewegen voordat het opgepakt wordt, en ook niet om vervolgens netjes terug te gaan naar de beginstand.
Samenvattend zijn we vooral bij de fabricage tegen problemen aangelopen, maar desalniettemin heeft het resultaat aan de meeste eisen voldaan.
Discussie proces
In het proces dat wij hebben doorlopen de afgelopen weken zijn, zoals eerder genoemd, enkele problemen opgetreden. Tijdens het proces zelf hadden wij vooral problemen met het snijden van onze perspex-plaat. We moesten een lasersnijbestand inleveren en dan zouden onze delen uitgesneden worden. Het bleek alleen meerdere malen dat de maten verkeerd in het bestand stonden waardoor onze delen pas heel laat uitgesneden konden worden. Als gevolg hiervan hadden wij erg weinig tijd om onze grijper in elkaar te zetten. Als wij dit de volgende keer beter willen doen zullen wij eerder moeten beginnen met het maken van ons bestand zodat deze van tevoren gecheckt kan worden.
Hiernaast hadden we ook een stuk beter en geordener kunnen vergaderen. Vooral de taken van voorzitter en notulist moeten duidelijker worden nageleefd. Tijdens dit project hebben wij weinig aantekeningen gemaakt en er zat ook weinig structuur in de vergaderingen. Hier valt nog veel progressie te behalen zodat ons dit kan helpen een beter overzicht te krijgen van de situatie. Hierdoor hadden wij andere problemen eventueel eerder kunnen verhelpen.
Voor een eerstvolgend project zullen wij de vergadertijd efficiënter gebruiken, en een minder afwachtende houding aannemen. Zo willen wij de problemen eerder voorzien, en de problemen minder op ons af laten komen.
Discussie ontwerp
Aan de hand van de praktijk kunnen we een aantal kritiekpuntjes over ons ontwerp benoemen. Het algemene probleem zat met name in de details, we zijn niet tegen fundamentele problemen aangelopen. De grijper heeft het pak op kunnen tillen en verplaatsen, alleen het teruggaan naar de beginpositie lukte niet meer. Ons grootste probleem was dat er op allerlei verschillende plekken speling ontstond. Dit kwam met name door het verschil in diameter van de gaten en de bouten. Ook ontstond er een speling tussen de sleuf van de driehoek en het plaatje dat er doorheen schuift. Hierdoor kantelde de grijper naar beneden, en al helemaal in de uitgeschoven stand hing de grijper te schuin. Dit was de grootste oorzaak van het niet terug kunnen naar de beginpositie: het plaatje stond te schuin ten opzichte van de sleuf en de actuator had niet genoeg kracht om deze extra wrijving terug te trekken.
Van tevoren hadden we wel bedacht dat dit een probleem zou kunnen worden, dus we hebben geprobeerd de speling te minimaliseren door het verschil in dikte van het plaatje en de breedte van de sleuf te minimaliseren, het plaatje van een glad materiaal te maken (perspex) en de actuator recht langs te sleuf te laten bewegen. Ook hebben we geprobeerd het plaatje zo breed mogelijk te maken waardoor de speling afneemt (zie figuur 1 voor verduidelijking). In de praktijk lukte het echter niet om de actuator recht achter het plaatje te plaatsen, en de andere oplossingen bleken nog niet genoeg. Waarschijnlijk zouden we aan de andere kant van het plaatje een contragewicht moeten plaatsen of een andere manier moeten bedenken om het plaatje beter in evenwicht te houden, om te voorkomen dat het zo schuin komt te staan.
Figuur 1
Verduidelijking termen (dus geen ontwerptekening).
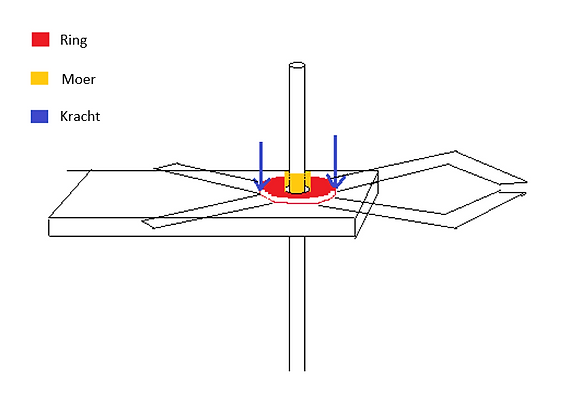
Het verschil in diameter van de bouten en gaten leverde ook een algemene speling in de hele grijper. Hierdoor kon de grijper in zijn geheel lichtelijk schudden, toch zorgde dit niet voor echt grote problemen. Alleen bij de schaar van de grijper hadden we er echt last van, omdat deze compleet was bevestigd aan zo’n bout. Hierdoor sloot de schaar niet goed af en had hij niet genoeg grip om de halve kilo op te tillen. De speling tussen de gaten en bouten hebben we opgelost door de moertjes om de bouten heen zo strak mogelijk aan te draaien. Het vervelende was dat de moertjes na enkele keren weer los draaiden, en dat ze niet voldoende oppervlakte hadden om de bout echt goed stil te houden. Daarom hebben we op de belangrijke plekken grote ringen toegevoegd, die meer oppervlakte hebben op het hout of perspex en vanwege de grotere diameter meer moment kunnen uitoefenen tegen de beweging in (zie figuur 2). Ook zorgen de ringen voor minder wrijving dan de moertjes, dus konden we op plekken die moesten scharnieren toch de moertjes strak aandraaien, zonder dat dit ten koste ging van de rotatie. Toch bleef het een probleem dat de moertjes zichzelf los draaien en na verloop van tijd de grijper meer en meer speling kreeg en daarmee niet constant was.
Figuur 2
Verduidelijking ring, moertje en moment.
Een ander discussiepunt is de horizontale beweging. Bij het lezen van de opdracht zijn wij van een plateau uitgegaan die aan de onderkant ruimte had, waardoor wij met de beweging naar het voorwerp toe, volgens ons ontwerp onder het plateau uit zouden komen. Later bleek dat het plateau bestond uit een massief blok, dus konden wij het voorwerp niet onder het plateau weghalen. Hierdoor konden wij met een massief plateau niet voldoen aan de eis dat de grijper naar het voorwerp toe beweegt voordat het voorwerp gepakt wordt.


Over ons

Tijmen Steensma

Jop van Teeffelen

Mehrshad Shomali
Jan van der Schot

Tijmen Snel

Kevin Tjia

Jasper Scheepstra